RCS3000�C����У���c���ܜyԇϵ�y����Ҫ�ɼ����ۙ�x�y��ϵ�y��������ܛ���M�ɣ�ͨ�^�����I�C�����\���^���ж�Nλ�˾��ȵľ��_�y����Ӌ����Ɍ��C����D-H �������p�ٱȡ���ϱȡ�TCP�c��Home�c�Ⱥ��ą���У�ʣ���Ч�����C���˶�λ����5-10 �������ܸ��wGB/T12642-2013/ISO9283-1998�˜�Ҏ����ȫ��14 �����ָ�˜yԇ��һ�I���������ĈD�Ĝyԇ��档 ����RCS3000�C����У���c���ܜyԇϵ�y����������С�Ĵ��r���a���I�C���˱��w�ĸ��N���،��µ�׃�μ��`��������I�C���˵Ľ^����λ���ȣ�������Ҫ���Ĺ��I�C���˵ęCе������ RCS3000�C����У���c���ܜyԇϵ�y�ѽ��ڰ�˹�D������ȶ����C���ˏS�ґ�����
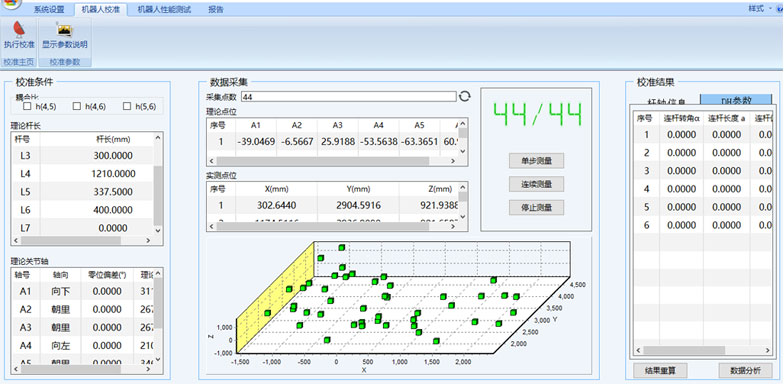
�C����У��ϵ�y�������c 1. �������ۙ�x���ɼ������_��15�ף� 2. ����Ɍ����P���C������SCARA�C������DELTA�C���˵�ȫϵ�ЙC����D-H �������p�ٱȡ���ϱȵȺ��ą���У�ʣ� 3. ��Ч�����C���˶�λ����5-10���� 4. һ�I���������ĈD�Ĝyԇ��棻 5. У���^�̲������Σ�Ч�ʸߡ�
У�ʲ��E 1. Ӳ���B�ӣ��B�Ӻü����ۙ�x���Դ���Լ�����X���B�ӣ����әC���ˣ� 2. ���b���b�������b���b�ã������úð��� 3. �y�����C���˾����ó�����50���c��ͬ�r����У�ʳ���ݔ����Փ�������M�Мy���� 4. У�ʣ��ڙC���˿�������ݔ��У�ʅ��������У�ʡ�
�C�������ܜyԇϵ�y�������c �����GB/T12642-2013/ISO9283-1998�˜�Ҏ����ȫ��14�����ָ�˜yԇ��
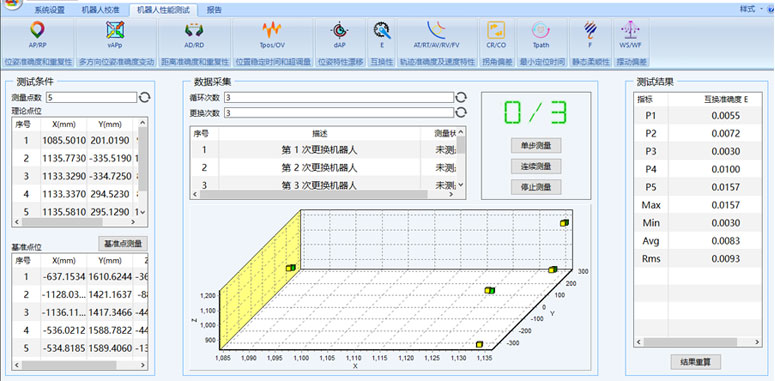
| �o�B���ܜyԇ | �ӑB���ܜyԇ | ��̖ | �Ŀ | �Ŀ | 1 | λ�÷����r�g | λ�÷����r�g | 2 | λ�ó��{�� | λ�ó��{�� | 3 | ܉�E�ʴ_�Ⱥ��؏��� | ܉�E�ʴ_�Ⱥ��؏��� | 4 | �ض���܉�E�ʴ_�� | �ض���܉�E�ʴ_�� | 5 | �ս�ƫ�� | �ս�ƫ�� | 6 | ܉�E�ٶ����� | ܉�E�ٶ����� | 7 | ��С��λ�r�g | ��С��λ�r�g | 8 | �[��ƫ�� | �[��ƫ�� | 9 | λ�˜ʴ_�Ⱥ�λ���؏��� | / | 10 | ���λ�˜ʴ_��׃�� | / | 11 | ���x�ʴ_�Ⱥ;��x�؏��� | / | 12 | λ������Ư�� | / | 13 | ���Q�� | / | 14 | �o�B����� | / |
���÷��� 1. �C���˘әC�_�l�� 2. �C���˶��͙z�y�� 3. �C���˳��S��գ� 4. �WУ�C���ˌ��I�n����Ӗ�� 5. �ṩ�C����У���c���ܜyԇ���g���գ� 

|